Supervised Autonomy in Robotic Surgery
Although protocols do exist for surgical procedures, the variance of anatomical regions and pathology define that surgeries are more like art instead of techniques. This nature determines that improving surgical outcomes needs both human expert knowledge and the efficiency of mechatronic systems.
RoCAL is interested in correlating surgical outcomes with surgical planning and surgical motions and builds supervised autonomous surgical robots to maximize surgical outcomes.
Probabilistic Modeling
Due to the extremely high demands on system reliability and safety of surgical robots, RoCAL is broadly interested in various modeling techniques, range from physical modeling to fancy learning techniques. We are especially interested in the differences in performance and reliability of various modeling techniques.
We modeled the Raven II robot, with various techniques, for establishing kinematic and dynamic models, modeling cable properties, and predicting gripping force. From these experiments, we draw an interesting conclusion that data-driven learning techniques tend to come up with conservative (smoother) estimations.
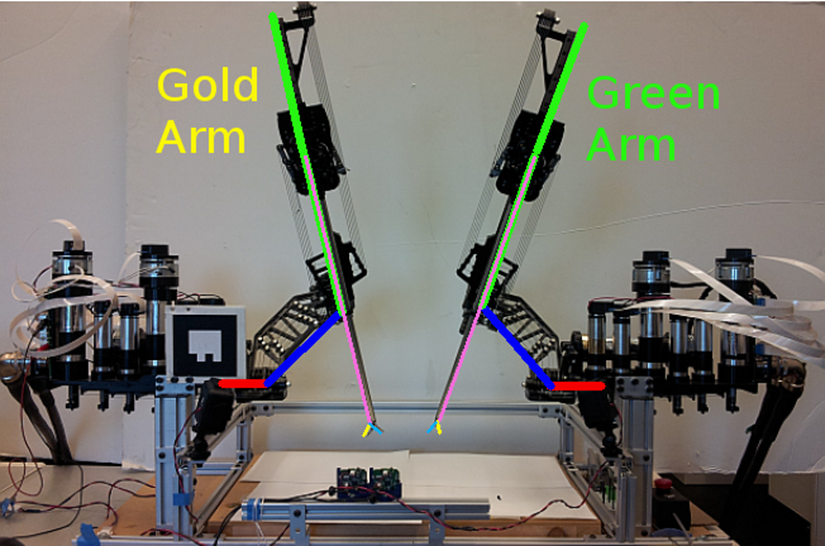
Raven II surgical robot

Roboscope
Roboscope is a flexible surgical robot designed for endoscopic surgeries, which can deliver 2 endoscopes and 2 instruments to the pathology, through one 8mm (diameter) tube.

Cable modeling for cable driven robot dynamics study and cable life study.

Dynamic modeling for serial cable driven mechanics

Gripper calibration for sensorless gripping force estimation
Comparing data driven modeling methods with Physical modeling methods on sensorless gripping force estimation
Probabilistic Planning and Control
The motion planning and control of surgical robots are often different than industrial robotic manipulators, due to the fact that surgical robots are often redundant in kinematics, cable-driven, and need to comply with various subtle constraints.
RoCAL uses probabilistic methods and neural networks to solve motion planning and control in the dynamic dual space.

These new control schemes have the advantages as:
1, converting constraints into network penalities to improve adaptiveness.
2, being efficient and complete,
3, being precise and robust.
We successfully applied these control schemes to surgical robots and addressed some problems, for example, soft-obstacle avoidance, motion planning in complex environments, and control precision.

Soft obstacle avoidance for robotic surgery.
While industrial manipulators simply avoid obstacles, surgical robots need to touch (soft) obstacles, under controlled manners. For example, a scissor can gently touch a healthy tissue from the side in order to make room, but should not poke the tissue.
Probabilistic Complete Motion Planning for Redundant Manipulators.

Collaborative Control.
Multiple manipulators or even multiple surgical robots need collaboratively working together, as human surgeons do.
Control of Flexible Surgical Robot (Roboscope).