Multidisciplinary Senior Design Project
NASA/ASU Psyche Robotic Explorer B

We are a senior design team tasked with developing a prototypical robotic explorer (rover) for use in NASA's Psyche-16 mission. Our take on this design challenge is to draw from existing rover designs, fitted with additional details to tackle the rigorous and unknown terrain of the Psyche-16 asteroid. As a result, we have a fully autonomous rover capable of navigating over wide swaths of varied and rough terrain, steep grades (both inclines and declines), and capture sensor data for return to Mission Control. In this demo, you will see the rover perform a simple navigation task in which it avoids large terrain obstacles and seamlessly navigates over smaller debris. We will also alternately be demo'ing the rover's hill-climbing and -descending capabilities.
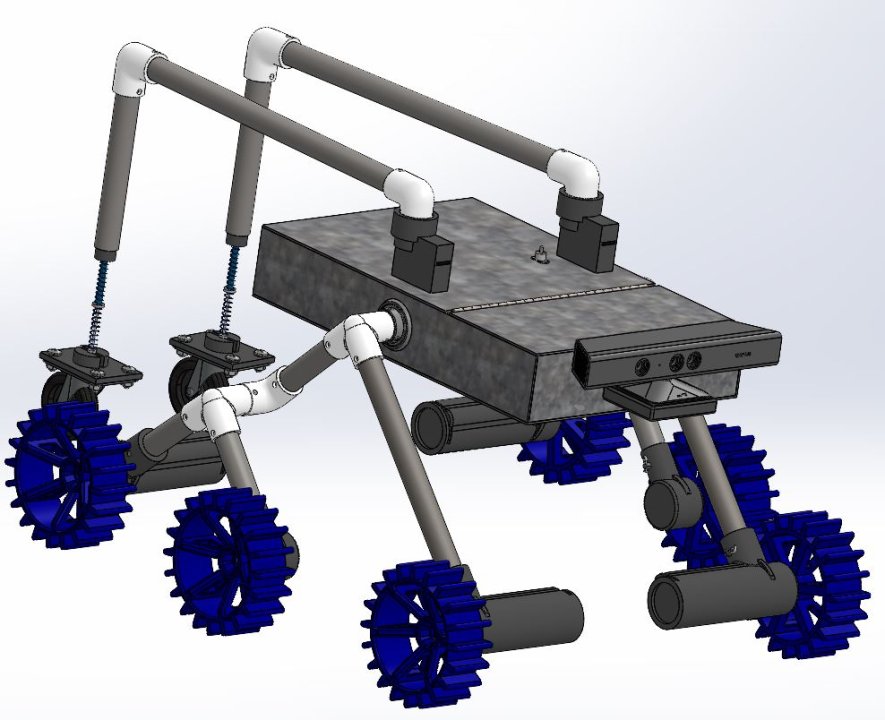
Simulation of rover design
Team Members
Parker White
Ryan Henry
Andrew Simmons
Julian Dominguez
John Wellin