Multidisciplinary Senior Design Project
Robot Manipulator Arm for SPOT

Currently, the EME department has a SPOT robot from Boston Dynamics with navigational capabilities. The robot was acquired to support RIT research and educational outcomes, with one research area of interest being search and rescue, in which objects need to be moved, lifted or otherwise physically manipulated based on force applied in a number of different ways. However, this robot lacks a manipulator to physically interact with the environment. The MSD project goal is to design a manipulator arm and interface the manipulator with SPOT.
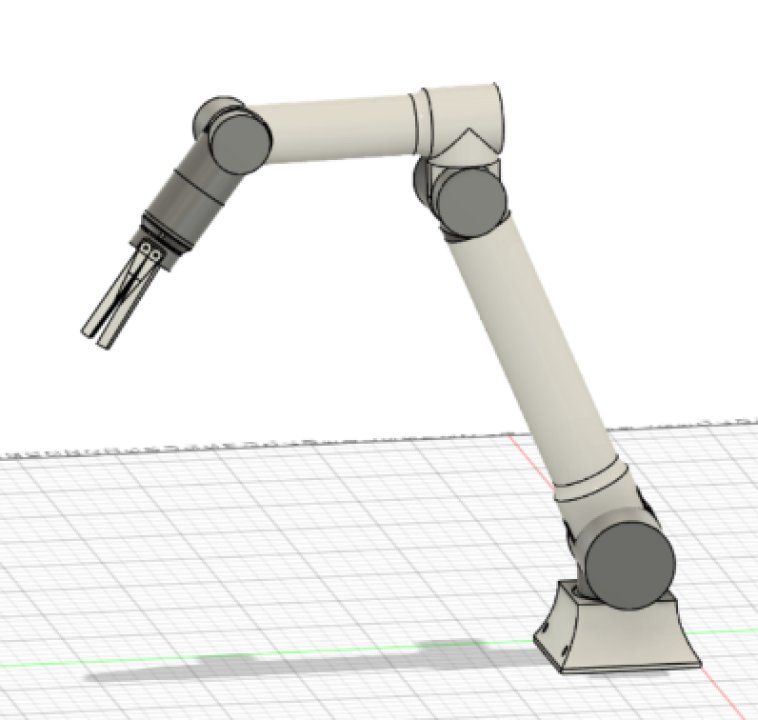
Initial design for SPOT's manipulator in Fusion360

Team (left to right): Jessica Panuccio, Jacob Winden, Martin Pepe, Jessica Torrellas, Cameron Spice, Dylan Moore
Team Members
Cameron Spice
Jessica Torrellas
Dylan Moore
Jessica Panuccio
Jacob Winden