Robotic Solutions: Student Project
June 27, 2024
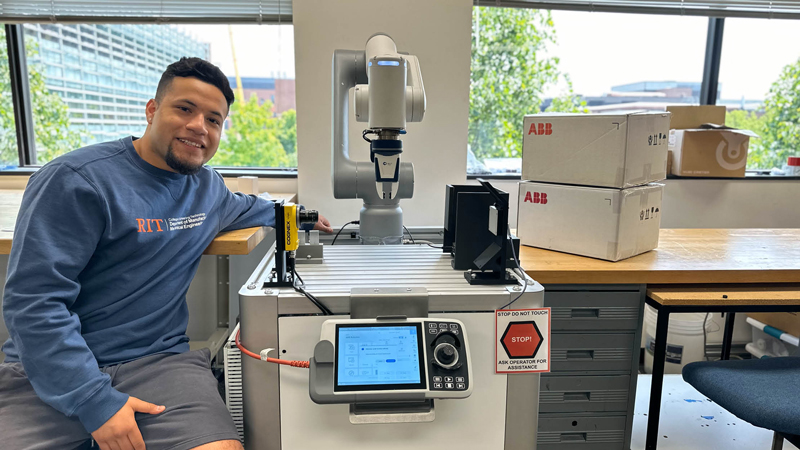
An RIT College of Engineering Technology student employs force feedback and vision systems on an ABB robot to simulate and optimize the grinding of dental tools.

More Featured Profiles and Work
Student

Alison Fink
Student

Yangming Lee, Robert Garrick
Faculty
