Ctrl+Salt+Delete AMR Bot
The AMR must navigate the RIT walkways and parking lots safely, detecting people and objects in its surroundings to avoid collisions while maintaining its path. It will evaluate environmental conditions to determine when and where salting is required, ensuring effective and consistent salt application. Additionally, it should be controllable remotely, providing flexibility in operation while maintaining precision and safety. This solution addresses the critical need for safer, more efficient winter maintenance on campus, combining intelligent sensing and autonomous mobility to meet the challenge.
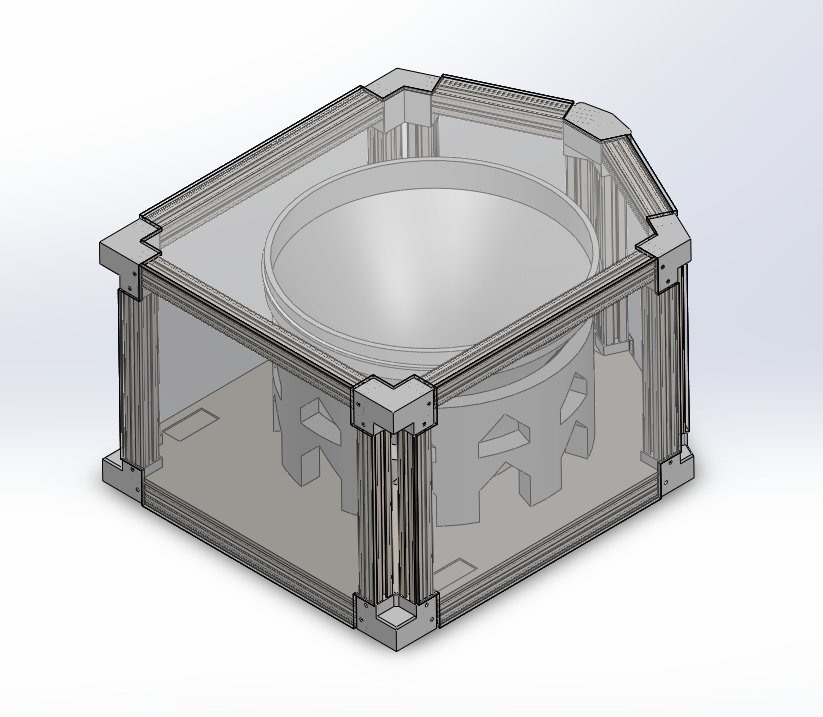
AMR Salt Bots Preliminary Base Design
Topics
Exhibitor
Brielle Rubin
Jordan Williams
Nayely Gonzales
William Roberson
Mia Gaylord
Evan Young
Advisor(s)
Professor Caldwell, Professor Tawaf, Professor Jakobsze
Organization
College of Engineering Technology
Thank you to all of our sponsors!