
AI/Robotics Lab

The AI/Robotics lab is dedicated to advancing various use cases and projects in AI and Robotics. Equipped with state-of-the-art tools, the lab supports applications such as autonomous navigation, manipulation, collaborative robots, and computer vision.
The lab aims to enhance students' learning experiences and exposure to AI and robotics through extracurricular activities and collaborative projects with the industry. The lab is equipped with advanced robotics and computing resources, including ROSbot 2.0 Pro, PhantomX AX Metal Hexapod MK-III, Ubiquity Magni-Silver unit, WidowX 250 Robot Arms, Bioloid GP Humanoid Robots, Dual-arm YuMi collaborative robot, and Duet mobile robot.
Goals and Objectives
Foster Innovation
Advance the development of new solutions in AI and robotics, focusing on autonomous navigation, manipulation, collaborative robotics, and computer vision.
Enhance Industry Collaboration and Partnerships
Build strong collaborations with industry leaders in AI and robotics to facilitate joint projects, internships, and sponsored research.
Provide Hands-On Learning and Skill Development
Offer students hands-on experience with state-of-the-art robotics and AI tools through structured lab courses, workshops, and extracurricular activities.
Promote Interdisciplinary Collaboration
Encourage interdisciplinary projects that bring together students and faculty from different fields such as computing science, engineering, and cybersecurity to solve complex problems.
Support Community Engagement and Outreach
Organize outreach programs, workshops, and competitions that engage the broader community, including K-12 students, in AI and robotics.
YuMi, developed by ABB, is a dual-arm collaborative robot designed for small parts assembly. It features a compact, human-like form with flexible arms, precision movement, and a wide range of motion, making it ideal for working alongside humans in a shared workspace. YuMi is equipped with advanced safety features, including force-sensing capabilities to avoid collisions, and is programmable to perform complex tasks with high accuracy. Its versatility and ease of integration make it a valuable asset for applications in electronics, consumer goods, and small parts manufacturing.

Duet, developed by MARSES, is a versatile, interactive mobile robot designed to operate as a standalone promoter in various environments such as universities, hotels, hospitals, airports, and more. Duet can greet guests, guide them, and conduct conversations. It also offers additional functionalities like checking in/out guests and providing information using expressive facial animations. Duet enhances user interaction and experience with its friendly and engaging design, making it a valuable asset for hospitality and service applications.

The ROSbot is an autonomous mobile robot platform that is powered by ROS (robot operating system). It also serves as a base for the further development of other robotic applications, and it is available in two versions: 2.0 and 2.0 PRO. Both versions encompass 4 wheels that contain DC motors, an Orbbec Astra RGBD camera, an MPU 9250 inertial sensor, and a rear panel. As per the picture demonstrated, the ROSbot 2.0 PRO is also equipped with a CORE2-ROS controller and an RPLIDAR A3 laser scanner.

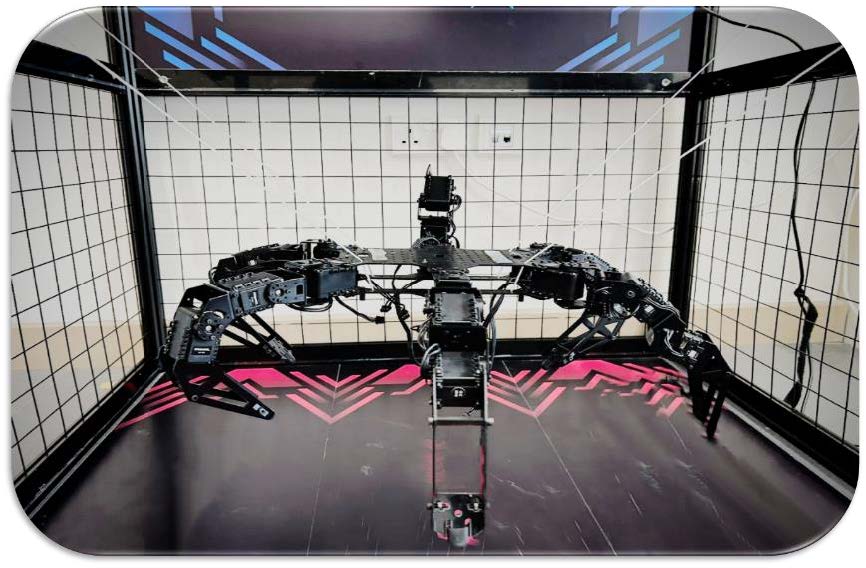
The PhantomX AX Metal Hexapod MK-III is built using aluminum servo frames, leg components, a body set, and an expansion deck that allows users to add further components such as sensors or actuators. It also includes advanced inverse kinematics and an open-source Arbotix-M microcontroller that deems the robot to be extremely flexible. The robot can be then controlled by using a wireless Xbee control.

The WidowX 250 Robot Arm, designed by Interbotix, provides 5 degrees of freedom with an addition of a full 360 degrees rotation. It is mounted on a high-grade industrial bearing base and is constructed using extruded aluminum. The gripper can also be interchangeable and customized by 3D printing according to the user’s preferences. The robot arm can reach any object up to 65 cm within its reach with a total span of 1.3 m.

The Bioloid GP Humanoid is composed of aluminum frames, Dynamixel motors, various sensors, and a controller. It is popular in many robot competitions, and it is run by using RoboPlus, which is a powerful GUI-based programming software. It can be then controlled using a wireless remote controller. Also, its high functionality allows it to complete many tasks, and interesting features such as basic humanoid battle and soccer motions are provided.

The Magni Silver Mobile Base provides an affordable robot platform that can be used to kickstart the development of further robotic applications. It is powered by ROS, which allows it to handle communication, localization, and mobility. The Magni is also equipped with powerful motors and chassis for better navigation. In addition, it comes with power sufficient for external hardware.

Faculty
Dr. Jinane Mounsef
Associate Professor of Electrical Engineering
Ph.D. in Electrical Engineering from Arizona State University, USA
Field of Expertise: Signal and Image Processing, Machine Learning, Computer Vision, Robotics
Researchers
- Dr. Abhilasha Singh
Postdoctoral Researcher in Electrical Engineering, Coordinator
Ph.D. in Electrical and Electronics Engineering from BITS Pilani, Dubai
Field of Expertise: Robotics, Machine Learning, Computer Vision - Houssein Kanso
Graduate Researcher in Electrical Engineering
B.E. in Mechatronics Engineering from the American Lebanese University, Lebanon
Field of Expertise: Robotics, Machine Learning, Computer Vision - Afnan Adil
Visiting Researcher in Electrical Engineering
B.Sc. in Electrical and Electronics Engineering, from Visvesvaraya Technological University, India
Field of Expertise: Robotics, Computer Vision
Leading Students
Mobile Ground/Aquatic Robotics
- Mohammad Faieq Daoud (Second Year Electrical Engineering)
Aerial Robotics/Drones
- Rohan Ashar (Third Year Electrical Engineering)
- Thisas Ranhiru (Second Year Electrical Engineering)
Manipulation/Collaborative Robots
- Ibrahim Alhaiek (Third Year Electrical Engineering)
Computer Vision
- Tayyab Sajid (Third Year Cybersecurity)
Affiliated Students
- Yusuf Mirza
- Adhel Siddique
- Afifa Monzur
- Annu Abhilash
- Yogesh Mata
- Raghul Saravanan
- Advika Sunil
- Sai Chaitanya
Resistor Sorting using YUMI
Team Members: Ibrahim Alhaiek, Sajid Tayyab, Adhel Siddique, Yusuf Mirza
Our team has been working on a Yumi robot designed to sort resistors. The robot uses a camera to identify different resistor types based on their color bands and then segregates them into appropriate bins. This project aims to streamline the resistor sorting process, making it more efficient and accurate. It’s been exciting to see the robot in action, improving both speed and precision in handling resistors.

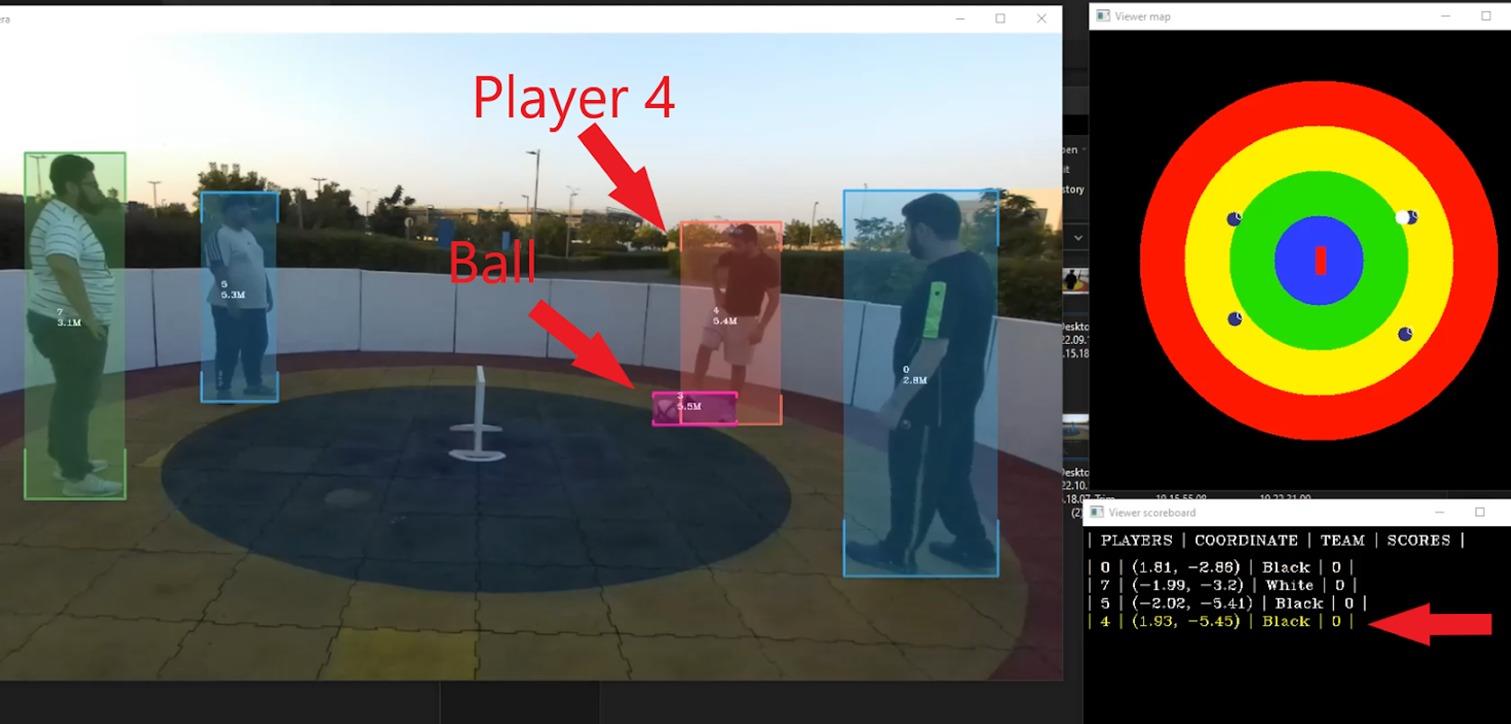
Target Football Scoring Game (In partnership with DSO)
Team Members: Sajid Tayyab, Afnan Adil
The Target Football Scoring Game is an innovative project that leverages machine learning and computer vision to enhance football gameplay and scoring. Designed for multiple teams of equal size, the game takes place on a circular field with color-coded zones indicating varying scores based on distance from the central goal. Utilizing a stereo camera setup, the system pinpoints the x, y, and depth locations of each pixel in a frame, identifies players and the ball, and maps them onto a virtual 2D field. Teams are distinguished by shirt colors, calibrated before each game, ensuring accurate team recognition. Scores are calculated based on the zone from which goals are scored. Despite occasional misses in high-paced scenarios, this system demonstrates a promising, device-free approach to sports analytics, with plans for further enhancements by integrating multiple camera feeds into a unified map. The project was selected as the best project at Imagine RIT Dubai in the student clubs category.
BaristaBot
Team Members: Mohammad Faieq Daoud, Afnan Adil
Welcome to the world of robotic culinary assistants! In this project, we are exploring how machine learning and robotic arms equipped with cameras can revolutionize the preparation and serving of beverages and snacks. Our system uses image recognition algorithms to detect input cues such as coffee types, cocktail mixes, popcorn readiness, and chocolate dip selections based on individual preferences. We aim to create an efficient and customizable experience that caters to individual tastes with accuracy and speed.

Arachne Hexapod for Security Surveillance
Team Members: Rohan Ashar, Thisas Ranhiru, Raghul Saravanan
Welcome to Project Arachne, where robotics meets innovation and creativity. Arachne is a hexapod robot designed to navigate any terrain, interact with humans, and perform complex tasks autonomously. Our goals include creating agile movement, enhancing environmental perception, and integrating AI for human detection and recognition. The primary objective of Project Arachne is to create a hexapod robot equipped with advanced sensors and AI capabilities to achieve agile movement, robust environmental perception, and seamless interaction with humans. Finally, to overcome mechanical challenges by implementing cutting-edge AI algorithms to demonstrate the potential applications of Arachne in various domains such as surveillance, assistance, and exploration.
Ecobot
Team Members: Mohammad Faieq Mohammad Daoud, Raghul Saravanan, Rohan Ashar, Thisas Ranhiru
This robot is engineered to identify and collect trash in a designated environment while navigating around obstacles. Its primary objectives include trash detection, identification, and obstacle avoidance. The integration of 2D-LIDAR, IMU, and CAMERA data enhances its capabilities in achieving these primary objectives. The project was selected as the winner of the 2nd Emirates Robotics Competition for the autonomous navigation category.

Autonomous Trash Sorting Robotic Arm Manipulator
Team members: Ibrahim Alhaiek, Tayyab Sajid, Yusuf Mirza
This project is about developing an automated waste sorting system using a robotic arm. The system is designed to pick up trash objects and sort them based on their material into metal, paper, plastic, or glass categories. The robotic arm, is equipped with an Intel RealSense camera that captures the table surface, runs clustering and object detection to identify objects, and determines their position. The arm then moves to pick up the object and place it in the appropriate bin. The project won second position at the 2nd Emirates Robotics Competition in the manipulation category.

Duet Receptionist Robot
Team Members: Thisas Ranhiru, Afnan Adil, Samiullah Shahabullah, Joyasree Roy, Omar Arafa, Ghaith Rajal
The Automated Duet Receptionist Robot at the Rochester Institute of Technology (RIT) represents a leap forward in robotics technology, designed to traverse the floors of Building D. This advanced robot is equipped with lidar, cameras, infrared sensors, and actuators, enabling it to expertly navigate complex environments. It can smoothly interact with elevators and avoid obstacles, as well as recognize current students and display their information ensuring seamless movement and help throughout the building. The Duet's capabilities extend to accurate floor mapping, elevator operation, and engaging interactions with visitors, enhancing both functionality and visitor experience at RIT.

IEEE Student Day (June 1, 2024)
The students Tayyab Sajid, Thisas Ranhiru and Simran Bhagchandani have proudly secured 2nd place in the Software Engineering Project category at the IEEE UAE Student Day event 2024 held at United Arab Emirates University. The team developed an innovative application called FreshKeep, designed to scan food items, track their details like expiry and nutritional info, and help donate them to food banks before they expire. Our goal is to aid in preventing food waste and make a positive impact on our community.

Innovation Day (May 11, 2024)
A day dedicated to showcasing and celebrating innovative ideas, projects, and technologies. RIT Innovation Day, which included the capstone final presentations and projects under Imagine RIT. This event brought together students, faculty, industry leaders, and community members to honor the achievements of RIT Tigers in different fields. The day was filled with an exciting showcase of diverse projects ranging from capstone designs and research co-ops to master’s theses, along with contributions from student clubs and independent initiatives. AIRC showcased its various projects such as DSO Football game, EcoBot, MakeX TigerBot, Hexapod, and our very own RoboCafe serving snacks. The member Tayyab Sajid won the award of the best student club project for the AI colored-based football referee project.

A2RL Autonomous Racing STEM Challenge (April 27, 2024)
Our members Mohammad Faieq Daoud, Raghul Saravanan, Thisas Ranhiru and Rohan Ashar lately participated in the A2RL Autonomous Racing STEM Challenge held in Abu Dhabi by Abu Dhabi Autonomous Racing League. Our team passed the first screening and got selected among the top 8 teams out of 17. In the final race, the tigers made it to the 3rd place.

Emirates Robotics Competition 2nd Edition (February 21, 2024)
We are proud to announce the remarkable achievements of 2 RIT teams at the 2nd Emirates Robotics Competition, held at Khalifa University in Abu Dhabi. The students Mohammad Faieq Daoud, Rohan Ashar, Raghul Saravanan, Thisas Ranhiru, Tayyab Sajid, Ibrahim Alhaiek and Yusuf Mirza excelled, with one team securing first place in the Autonomous Navigation Challenge and another achieving second place in the Manipulation Challenge. This prestigious event, co-organized by Khalifa University, Dubai Future Labs and RIT Dubai, shortlisted 27 teams from 10 UAE universities. Congratulations to our students and mentors for their outstanding performance and for showcasing RIT Dubai's commitment to excellence!

MakeX Challenge (November 20, 2023)
Our members secured the first position of the MakeX Challenge and have been officially awarded their golden medals by the Electrical Engineering and Computing Sciences department in recognition of their remarkable achievement. The students Mohammad Faieq Daoud, Afifa Monzur, Annu Abhilash and Yogesh Mata won first place by competing against 6 finalist teams from different universities in the UAE. The students who are very passionate about AI and Robotics, showed exceptional talent and an outstanding performance competing against other innovative students from different universities!

Emirates Robotics Competition 1st Edition (March 7, 2023)
The members Aron George, Noureddin Adnan and Adnan Kassoumeh secured the second position in the manipulation category of the First Emirates Robotics competition held at RIT Dubai and in partnership with Dubai Future Labs and Khalifa University. The competition gave these talented students the opportunity to showcase their abilities in implementing an automated grocery sorting using a robotic arm equipped with a camera.
Computer Vision in Matlab Series of Workshops (Spring, 2024)
Dr. Abhilasha Singh led a series of workshops focused on teaching computer vision techniques using MATLAB software. These workshops, hosted for AIRC members, aimed to provide a comprehensive understanding of the fundamentals of computer vision and its applications. Dr. Singh demonstrated the use of MATLAB along with image processing and feature extraction add-ons, illustrating how to implement these techniques in real-world scenarios. Additionally, she showed how to link MATLAB to ROS (Robot Operating System) and demonstrated the use of Simulink for controlling a robotic arm. The workshops offered valuable insights and practical skills for leveraging computer vision in various applications.

AI Workshop for Art School Teachers (February 3, 2024)
Dr. Jinane Mounsef led a workshop designed to educate art school teachers on the applications and integration of artificial intelligence in art, music, and sports education. This one-day workshop provided an overview of fundamental AI concepts and included hands-on activities to equip teachers with the skills needed to use advanced AI tools in their classrooms. The participating teachers found the workshop highly beneficial and expressed their gratitude for the valuable insights and practical training they received.

Metaverse Series of Workshops (Fall, 2023)
Dr. Abhilasha Singh conducted a series of workshops for AIRC members, concentrating on the fundamentals of Digital Twin technologies and their diverse real-world applications. During the sessions, Dr. Singh showcased the use of MATLAB Simscape Multibody and RoboAnalyzer to create digital twin environments for various robots. The final workshop included an in-depth demonstration of motion planning for a quadcopter within a digital twin environment, offering participants valuable insights and practical skills for applying Digital Twin technology in various real-world scenarios.
ROS Series of Workshops (Fall, 2023)
A series of workshops centered around the Robot Operating System (ROS) were conducted, focusing on its various uses and implementations. Led by Houssein Kanso, these workshops were organized for AIRC members to learn the basics of ROS and its applications. Kanso demonstrated how to use ROS for robot sensing and navigation, and also showed how to deploy it on a real robot to perform Simultaneous Localization and Mapping (SLAM).
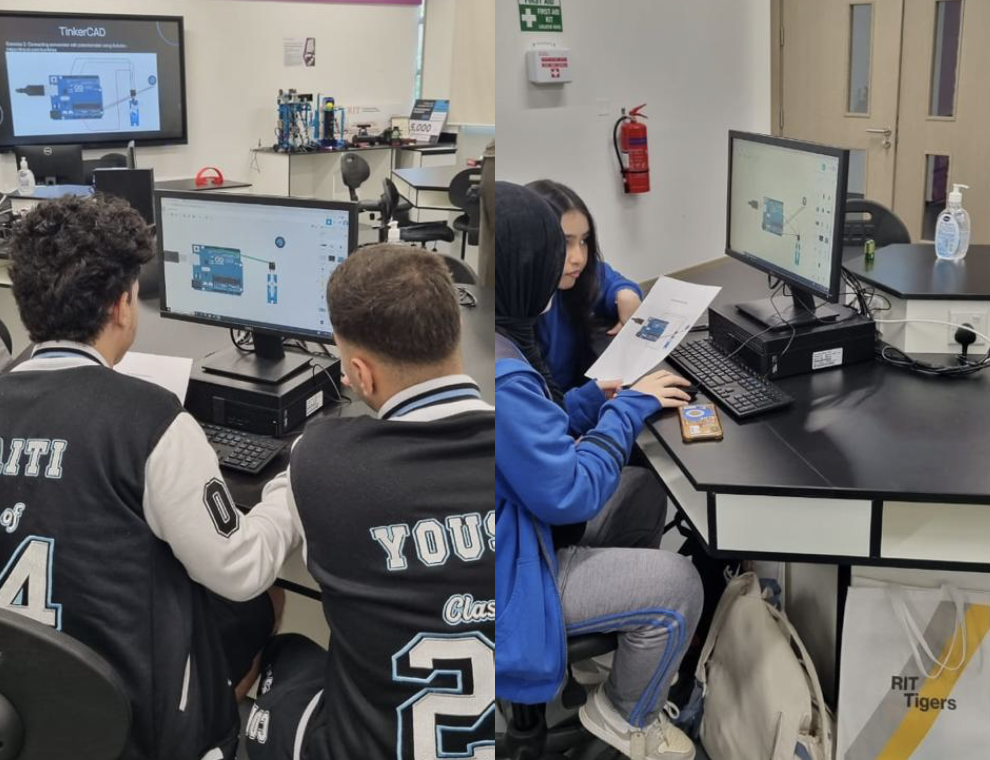
High Schools Workshops (Fall, 2023 and Spring, 2024)
These workshops were specifically designed for high school students, covering a range of topics related to technology and innovation. The program began with a brief introduction and a tour of our lab, followed by sessions on Arduino programming and the basics of robotics. Students had the opportunity to explore and experiment hands-on with Tinkercad simulations, gaining an understanding of basic robot motor control, and working directly with Arduino boards. These workshops provided a comprehensive and engaging learning experience, allowing students to delve into the world of robotics and programming.
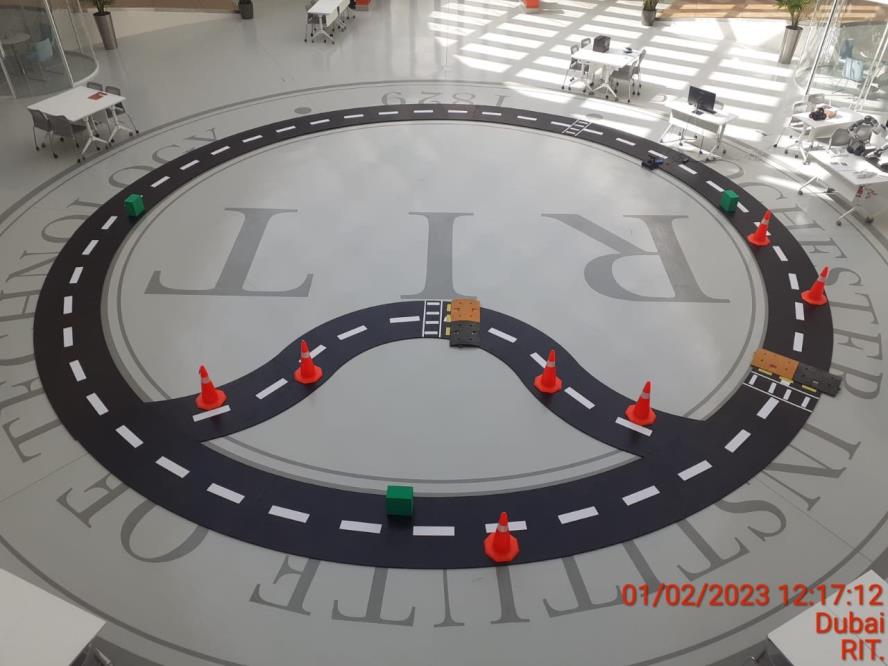
High School Robotics Competition (November 9, 2023)
This competition was designed for high school students to build their own robots and navigate autonomously in a designated arena. The primary objective was for the robots to pick up colored balls and place them in the corresponding colored locations. Each colored ball carried a specific score, and penalties were incurred if the robot hit or collided with any objects. The purpose of the competition was to foster interest in robotics and engineering among students, encouraging them to apply their knowledge in a practical and challenging environment. 14 schools from across the UAE registered for the competition, with 8 schools successfully participating. The competition concluded with impressive outcomes, showcasing the students' creativity and technical skills. The winning teams demonstrated exceptional robot design and programming, effectively completing the tasks with precision and minimal penalties.

Contact
Jinane MounsefChair of Electrical Engineering and Computing Sciences Department, Associate Professor of Electrical Engineering
jmbcad@rit.edu